

的MIPGap参数控制的最小的返回的质量解决方案。这是一个上限的实际MIP差距最终的解决方案。它可以发生,Gurobi运行,直到找到一个解决方案,明显优于MIP差距,因为它并不总是可能终止与给定MIP差距的需求。原因之一是改进的差距是发生在跳跃,而不是持续发展:
请注意,MIPGap参数不仅是算法的终止准则,也影响其他部分。这可能发生解算器采用了不同的路径,当使用不同的手机万博登录MIPGap表现不同。
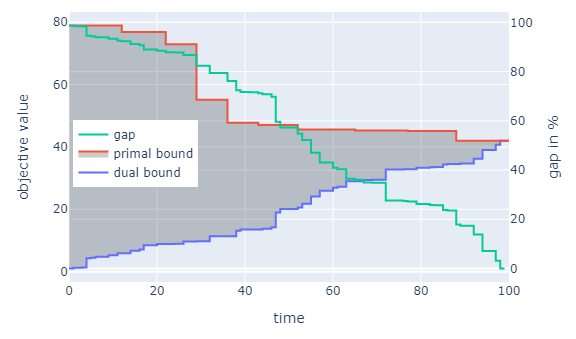
记得的差距Gurobi计算使用以下公式:
\[\压裂{左| \ \文字{ObjBound} - {ObjVal} \ \文本正确|}{\左文本{ObjVal} | \ \ |} \]
一些决策者担心,他们可以把钱放在桌子上通过设置一个积极宽容εMIP差距。缓解这一担忧,请注意优化过程中可能有不同的场景:
- 有时,Gurobi找到全局最优解在早期虽然当前MIP差距大于允许的公差(如当前MIP差距40% vs 0.01%的ε),所以剩下的优化时间是花在试图得到最优的证书通过双重约束对现任的客观价值的解决方案。
- 但是,有时候Gurobi完成优化运行(因为当前MIP差距已经在公差定义的ε)和报告的解决方案可能不是最优的解决方案。在这种情况下,我们说现任解决方案是ε-suboptimal的客观价值达到最多是ε(例如0.01%)从其他解决方案获得的价值更糟能找到如果我们继续探索和树(虽然不能保证这样的解决方案,在上面的重点已经解释过)。
在任何情况下,对于一个给定的MIP差距宽容ε,一旦完成Gurobi,你保证解决方案的最优解在ε-neighborhood发现的解算器。手机万博登录此外,对于真实的应用程序,它总是明智的树立一个正面的MIP间隙公差管理有一个可行的解决方案之间的权衡是足够好的用例和探索所需的计算时间和树(很多时候是禁止性的排气,搜索)。
评论
0评论
文章是关闭了评论。