线性优化问题的几何形状
线性优化问题的几何形状
在显示出现不良行为的优化模型之前,我们首先需要了解几何学在他们后面。考虑表单的问题
例如:
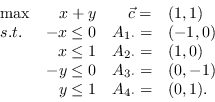
请注意,如果我们表示
可行的区域,改善方向
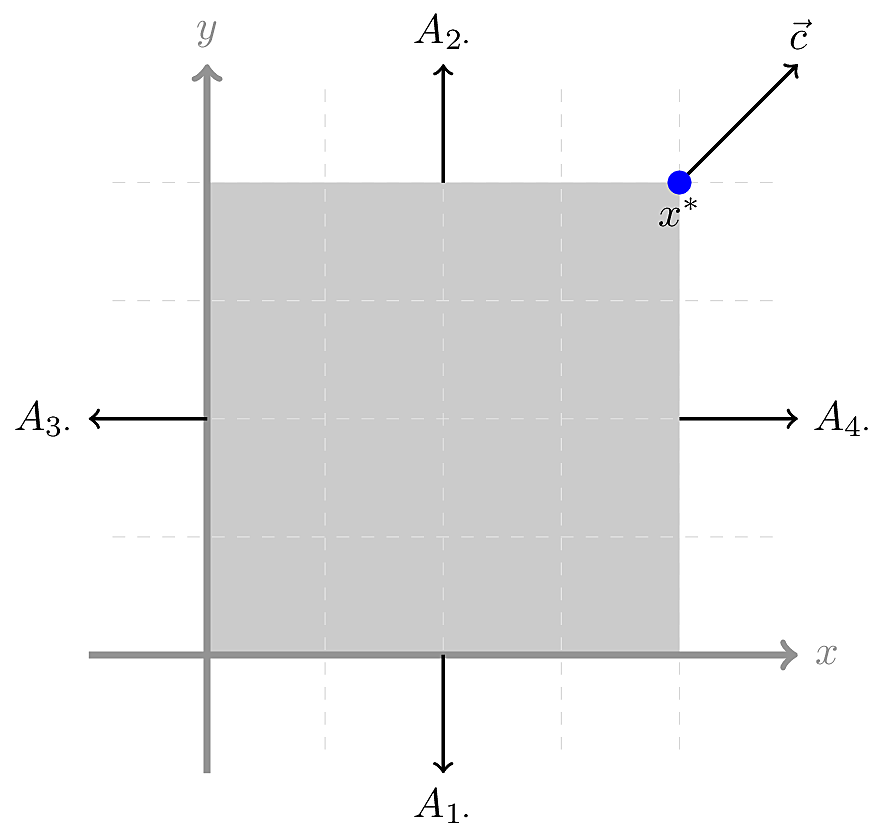
要了解输入数据的变化如何影响可行区域和最佳解决方案,请考虑一个小修改:![]() 那
那![]() , 和
, 和![]() 。然后我们的优化问题看起来像
。然后我们的优化问题看起来像
请注意,虽然我们改变了右侧,但这种变化对问题的最佳解决方案没有影响,但它通过扩大可行区域的底部来改变可行区域。
改变目标矢量在图形表示中倾斜相应的向量。这当然还会改变最佳目标值。扰动约束倾向于约束的图形表示。变化![]() 改变原始解决方案本身。大量的倾斜约束经历取决于扰动的相对值。例如,虽然约束
改变原始解决方案本身。大量的倾斜约束经历取决于扰动的相对值。例如,虽然约束![]() 和约束
和约束![]() 诱导相同的可行区域,扰动
诱导相同的可行区域,扰动![]() 会诱导更多的触摸扰动
会诱导更多的触摸扰动![]() 。
。